De opdracht en opdrachtgever
Deze periode kregen we een opdracht om een eigen opdracht gever te vinden. De opdracht was dat er soms problemen waren in sporten en we daar een oplossing op moesten vinden. Wij kwamen uiteindelijk op Klimhal Amsterdam B.V. en zij kwamen met het probleem dat als je nieuwe routes bouwt je de grepen met de hand omhoog moet trekken en dat heel veel tijd kost en vermoeiend is. Ze vroegen of wij iets wouden maken om dat probleem op te lossen.
Onze ideeën
We hadden drie beste ideeën gekozen om dit probleem op te lossen en ze voor gelegd aan de opdrachtgever: een drone, een gekko die de muur op klimt en een verbetering op het zeker systeem. Uiteindelijk vond de opdrachtgever de gekko het beste.
Het uiteindelijk ontwerp
Het uiteindelijk ontwerp bestaat uit drie delen: de Gekko, het sensorensysteem en de tas.
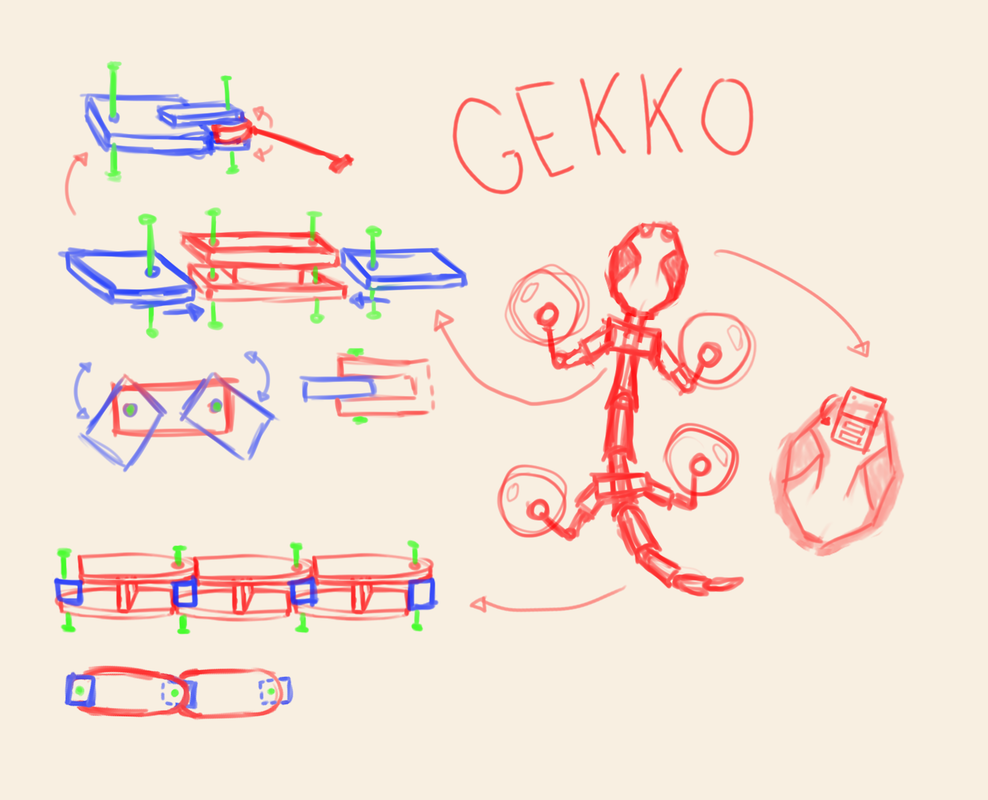
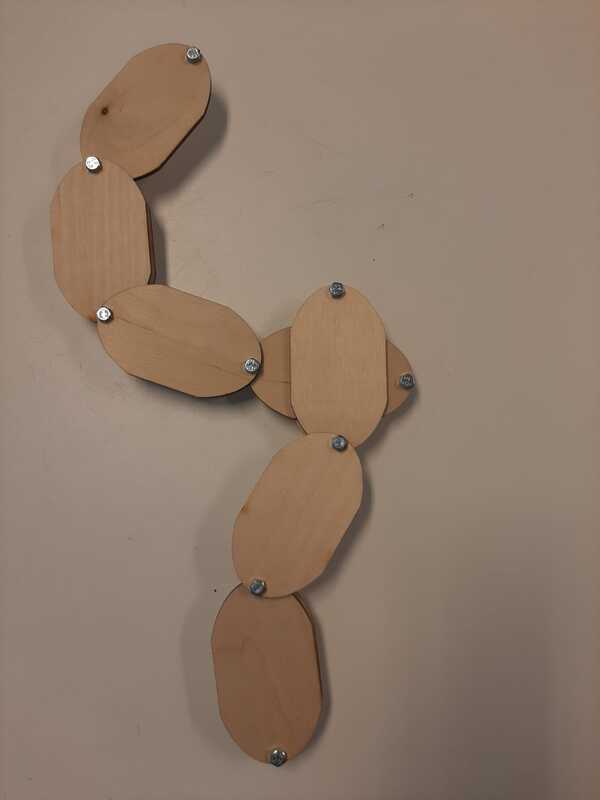
De gekko
De gekko loopt de muur omhoog door haken te haken in de gaatjes in de muur het is ook de bedoeling dat je van te voren de route die je gaat lopen er in kan plannen zodat hij gaat waar je heen wilt, een ander alternatief hiervoor is het gebruik van een afstandsbediening.
Het sensorensysteem
Zodat de haken weten waar ze kunnen in haken laten we van te voren een scan maken van de hele ruimte en kan je daarin de al bestaande routes en de route die je van plan bent om te bouwen in programmeren.
De tas
Om de grepen nou echt mee naar boven te kunnen nemen komt er een tas die je kan bevestigen aan de rug van de gekko, Voor makkelijke opbergbaarheid is de tas ook nog inklapbaar.
Deze periode kregen we een opdracht om een eigen opdracht gever te vinden. De opdracht was dat er soms problemen waren in sporten en we daar een oplossing op moesten vinden. Wij kwamen uiteindelijk op Klimhal Amsterdam B.V. en zij kwamen met het probleem dat als je nieuwe routes bouwt je de grepen met de hand omhoog moet trekken en dat heel veel tijd kost en vermoeiend is. Ze vroegen of wij iets wouden maken om dat probleem op te lossen.
Onze ideeën
We hadden drie beste ideeën gekozen om dit probleem op te lossen en ze voor gelegd aan de opdrachtgever: een drone, een gekko die de muur op klimt en een verbetering op het zeker systeem. Uiteindelijk vond de opdrachtgever de gekko het beste.
Het uiteindelijk ontwerp
Het uiteindelijk ontwerp bestaat uit drie delen: de Gekko, het sensorensysteem en de tas.
De gekko
De gekko loopt de muur omhoog door haken te haken in de gaatjes in de muur het is ook de bedoeling dat je van te voren de route die je gaat lopen er in kan plannen zodat hij gaat waar je heen wilt, een ander alternatief hiervoor is het gebruik van een afstandsbediening.
Het sensorensysteem
Zodat de haken weten waar ze kunnen in haken laten we van te voren een scan maken van de hele ruimte en kan je daarin de al bestaande routes en de route die je van plan bent om te bouwen in programmeren.
De tas
Om de grepen nou echt mee naar boven te kunnen nemen komt er een tas die je kan bevestigen aan de rug van de gekko, Voor makkelijke opbergbaarheid is de tas ook nog inklapbaar.